CS188-P5 Reinforcement Learning
强化学习用于解决怎样的问题 | 基本的强化学习算法 | CS188 Project 3
Motivation
在P4中,我们讨论了如何利用Value Iteration等算法解决MDP问题,这些算法的基本特征是其事先拥有计算optimal policy所需的全部信息。(参考如下贝尔曼方程,所需的全部信息无非$T,R$)
$$
V^{\star}(s)=\underset{a}{max}\underset{s’}{\sum}\space T(s,a,s’)[R(s,a,s’)+\gamma V^{\star}(s’)]
$$
如果$T,R$未知,我们就需要依靠Learning来获取需要的信息。Learning有很多种,最基础的是监督学习和强化学习。
监督学习:事先有一些标注好的数据,学习的过程就是训练Agent在遇到类似情况时按照标注数据行动。
监督学习有两大难点:一是标注数据很难覆盖全部情况,比如在棋类游戏中,很难有一个大师数据库能提供所有状态下正确的走法;二是很多应用场景没有标注数据。在这种场景中就需要用到强化学习
强化学习:Agent不断与环境交互并获得反馈,利用这些反馈来修正自己的行为。反馈其实也属于先验知识,但它往往比较清晰简单,比如下棋时的胜负,赛车时是否沿赛道行进等。这是强化学习与监督学习本质不同的地方,强化学习所需要的先验知识很简单就能获得,无需标注数据。
根据要学习的目标不同,强化学习可分为两种,以MDP为例:
- Model-based Learning: 通过Learning获得$T,R$,然后再求optimal policy
- Model-free Learning: 直接学习values/q-values
根据Agent的行为是否改变,强化学习又可分为两种:
- passive: 事先给定一个policy $\pi$, Agent完全按照$\pi$与环境交互并收集反馈完成学习。
- 如果是model-free, 那学习的目标就是$V^{\pi}(s)$, 否则将是Transition model.
- 因为固定$\pi$显然没办法获取MDP的全部信息,因此passive reinforcement必须和其它方法结合起来使用才能求出真正的optimal policy
- active: Agent一边学习一边修正自己的行为,直到学出optimal policy.
- Agent必须尽可能多地与环境产生不同交互才能习得全部知识,这个阶段称为exploration. 与此同时,Agent也需要将自己的行为逐渐收敛到optimal policy,这个阶段称为exploitation. 如何平衡分配在两个阶段花费的时间是一个值得讨论的话题。
Model-based Learning
Model-based Learning算法直接估计$T,R$的估计值$\hat{T},\hat{R}$.
计算$\hat{T}$
选定一个随机的policy $\pi_{explore}$记录从$(s,a)$到$s’$的次数$Cnt[(s,a,s’)]$, 以及到达q-state$(s,a)$的总次数$Cnt[(s,a)]$. 则有:
$\hat{T}(s,a,s’)=Cnt[(s,a,s’)]/Cnt[(s,a)]=f(s’|a,s)$. 其中$f$表示事件的频率
事实上,MDP具有如下性质:$T(s,a,s’)=P(s’|a,s)$. 根据大数定律,当取样次数足够多时,$\hat{T}$将收敛到$T$
之后尝试不同的policy求出所有$T$
计算$\hat{R}$
从q-state$(s,a)$转移到$s’$时,$R(s,a,s’)$就获知了。因此只要尝试不同的policy直到所有$R$已知即可。
在求出$T,R$后,应用P4中讨论过的Policy Iteration即可。
这种方法的弊端是我们需要维护每个tuple的$Cnt$,memory overhead很大。
Model-free Learning
- passive reinforcement learning
- 给定policy $\pi$, 学习出$V^{\pi}(s)$.
- active reinforcement learning
Direct Evaluation
DE是一种passive reinforcement learning:确定一个随机的policy $\pi$,然后不断采样,统计每个状态$s$获得的总收益$totalValue$, 以及所有样本中到达状态$s$的次数$Cnt$. 采样足够多次数后,$V^{\pi}(s)=totalValue(s)/Cnt(s)$.
这个想法相当直观,因为$\pi$已经确定,那么从状态$s$出发到终止状态$s_t$所经过的每种状态迁移序列的出现概率 × 该序列收益即为$V^{\pi}(s)$.
采样次数足够多时,$totalValue(s)$中各个tuple$(s,a,s’)$出现的频率收敛到概率,因此等式成立。
这种方法的弊端是需要采样足够多次数,否则结果与真实值相差较大。
Temporal Difference Learning
TD-Learning也是一种passive reinforcement learning,它的核心思想是从所有经验中学习。要理解这个思想,首先回顾DE的做法————对于每个样本$(s,a,s’)$,DE仅仅记录其产生的收益和次数,并没有完全利用这里面的状态转移信息。
我们将passive reinforcement learning的目标重新表述为:在不求$T$的情况下直接解下列方程组,更一般的来说就是在不知道权重的情况下求加权平均。TD-Learning通过指数移动平均法达成上述目标。
$$
V^{\pi}(s)=\sum_{s’}T(s,\pi(s),s’)[R(s,\pi(s),s’)+\gamma V^{\pi}(s’)]
$$
初始化$V^{\pi}(s)=0$
对于每一次状态转移$(s,\pi(s),s’)$, 可以得到值$sample=R(s,\pi(s),s’)+\gamma V^{\pi}(s’)$. 该值实际上是对$V^{\pi}(s)$的新估计值。接下来就要把新估计值以某种方式加入到之前的估计值中(反馈)。具体地,我们采用如下更新策略:
$$
V^{\pi}(s)\leftarrow(1-\alpha)V^{\pi}(s)+\alpha* sample
$$
其中, $0\leq \alpha \leq 1$. 其含义为学习速率,表示我们对新估计值的认可程度。很显然,当$V^{\pi}$贴近真实值时, $\alpha$越小,收敛速率越快反之亦然。一般来说,整个学习过程中$V^{\pi}$是越来越贴近真值的。因此通常在一开始指定$\alpha=1$, 然后逐渐减小$\alpha$的值。从另一个方面我们也能看出这个更新公式有效的原因,即使假设$\alpha$不变,展开递推式易得:
$$
V^{\pi}k(s)=\alpha\cdot[(1-\alpha)^{k-1}\cdot sample_1+…+(1-\alpha)\cdot sample{k-1}+sample_k]
$$
因为$0\leq1-\alpha\leq 1$, 因此越老旧的样本在后期比重越小。这很符合直观,因为随着算法的不断迭代,样本的准确值是逐渐上升的,我们当然希望准确的样本能占比更多。不断迭代直到收敛
再次理解从所有经验中学习:在TD-L中,每一个样本包含了状态转移的信息且都在最终的结果有一席之地。
Q-Learning
DE和TD-L从本质上来说都只是在求$V^{\pi}$, 而要想真正得到optimal policy还需要借助其它手段,比如model-based learning等。而求出$Q^{*}$则可直接导出optimal policy.
首先,如果$T,R$已知,我们可通过q-value iteration求解,其迭代式如下:
$$
Q_{k+1}(s,a)=\sum_{s’}T(s,a,s’)[R(s,a,s’)+\gamma \space \underset{a’}{max}Q_k(s’,a’)]
$$
然而,权重未知。但这和TD-L形式完全一致:在不知权重的情况下求加权平均。因此继续采用指数移动平均法即可求解。
$$
sample=R(s,a,s’)+\gamma \space \underset{a’}{max}Q_k(s’,a’)
$$
$$
Q(s,a)\leftarrow (1-\alpha)Q(s,a)+\alpha*sample
$$
Approximate Q-Learning
Q-L已经足够好了,美中不足的是为了执行该算法需要维护所有的q-value. 一旦状态数太多(而这十分常见),很容易就会超过计算机内存限制。而很多状态其实是“相似”的,没必要逐个学习其q-value而是可以举一反三。
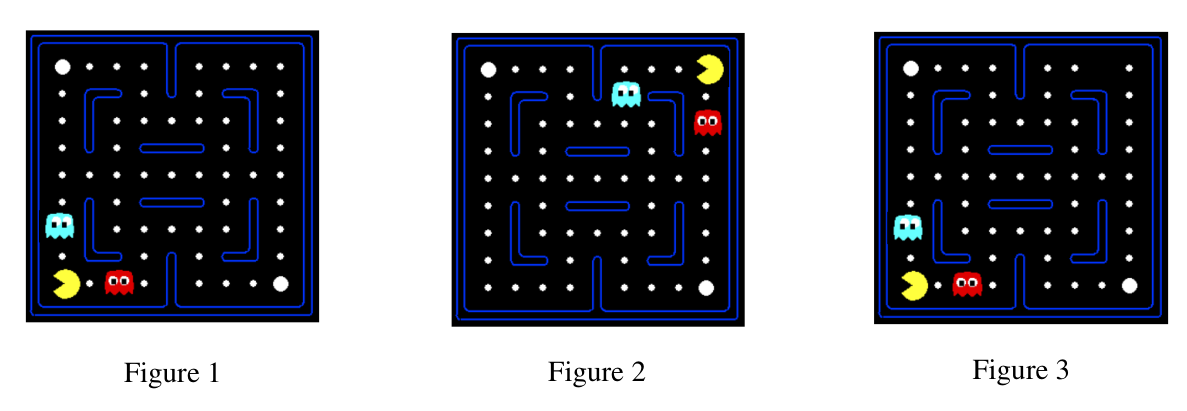
以上图为例,Figure1,2,3分别代表三种q-state。在传统Q-L中需要分别维护其q-value然后逐渐迭代收敛。但实际上只要习得Figure1对应的q-value,发现这种状态收益差,就可以直接推断出Figure2、Figure3收益也差,而无需再逐次收敛求解。
这种idea本质上就是只学习具有代表性的情况。换句话说,我们需要将原来state的本质特征抽象表示为特征向量,进而可得出:
$$
V(s)=w_1\cdot f_1(s)+w_2\cdot f_2(s)+…+w_n\cdot f_n(s)=\vec{w}\cdot\vec{f}(s)
$$
$$
Q(s,a)=\vec{w}\cdot \vec{f}(s,a)
$$
其中$f_i$表示特征函数,比如在Pacman中可以是距离最近gohst的距离
对$V(s)$的重构使得我们的问题变成了学习参数$\vec{w}$,操作如下:
定义$diff=[R(s,a,s’)+\gamma \space \underset{a’}{max}Q_k(s’,a’)]-Q(s,a)$, 则更新规则如下:
$$
w_i\leftarrow w_i+\alpha\cdot diff\cdot f_i(s,a)
$$
如此,我们就只需要在内存中维护$\vec{w}$, 在学习结束后按需计算$Q^{*}$即可。
Q: AQ-L的idea和最终的算法是怎么联系到一起的?
在上文中我们看到AQ-L的启发式动机是,在Q-L中学习了大量重复的内容。因此为了优化,我们希望的是对于相似的情况只学习一遍,其它情况由这一遍习得的结果推断得出。这个idea促使我们不再学习具体的state’s value,而是学习从相似states中抽象而来的特征的value. 而一旦抽象出特征,value就可立马表示成线性值函数,需要学习的内容进一步变成了值函数的参数。
Exploration and Exploitation
$\epsilon$-Greedy
想法非常简单,选定$\epsilon\in[0,1]$。
在每一次选择action时以概率$\epsilon$采用random policy(即在所有legalActions中随机选择), 以概率$1-\epsilon$采用当前的estimated optimal action.
在实际应用中$\epsilon$需要人为tune. Project3中有类似的题目,见下文。
Exploration Functions
更新规则变为:
$$
Q(s,a)\leftarrow (1-\alpha)Q(s,a)+\alpha\cdot [R(s,a,s’)+\gamma \underset{a’}{max}f(s’,a’)]
$$
$f$有很多种定义,较为常见的是如下:
$$
f(s,a)=Q(s,a)+\frac{k}{N(s,a)}
$$
其中$k$是一个提前确定的常数,$N(s,a)$表示该q-state被访问的次数
Q: Exploitation和Exploration分别有什么意义?
指数平均移动法收敛到一个q-value的真值需要多轮采样。学习完毕后Agent的行为是利用学到的q-values计算optimal policy,因此学习阶段的目标是让真正optimal的q-state“凸显”出来。如果没有exploitation阶段,那最优策略的收益离真值较远,有可能被次优解给挤掉了。形象一点来说,exploitation阶段的目标是发掘当前最优策略的真正价值,避免被埋没。
当然,也不能只有exploitation,这同样会使得最优解不一定被发现。
CS188 Project3
Q1 Value Iteration
将贝尔曼方程原模原样搬上来即可。稍微值得注意的是,每一轮迭代更新$s$时依赖的$state$可能已经被更新了,因此需要先保存所有$states$上一轮迭代的值用作更新。
1 | def runValueIteration(self): |
Q2 Bridge Crossing Analysis
这题很有意思,让你自己调整MDP的参数使得Agent的行为符合预期规定。通过这题可以很好地体验各个参数的作用。
$$
discount=0.9,noise=0
$$
Q3 Policies
Q3和上题考察目标一样,不过地图变得更加复杂了。

| 目标 | discount | noise | living reward | 解释 |
|---|---|---|---|---|
| 冒险去+1 | 0.01 | 0 | 0.01 | 尽快结束(高衰变率),不易落入陷阱(低随机性) |
| 避险去+1 | 0.2 | 0.2 | 0.01 | 尽快结束,易落入陷阱 |
| 冒险去+10 | 0.9 | 0 | 0.01 | 不用尽快结束,不易落入陷阱 |
| 避免去+10 | 0.9 | 0.5 | 0.01 | 同理 |
| 既不想结束也不想落入陷阱 | 0.1 | 0.2 | 0.01 | 活着的收益比结束带来的收益大,略微减少discount即可 |
Q4 Asynchronous Value Iteration
和Q1基本相同,唯一区别在于这回一次迭代只更新一个$state$, 因此依赖的其它$state$都是最新值。
1 | def runValueIteration(self): |
Q5 Prioritized Sweeping Value Iteration
用优先级队列优化迭代。
ValueIteration的目标是尽可能早地迭代至不动点,此时就一定是最优解。引入优先级队列就是要让最有可能造成policy改变的state优先迭代。
怎样的state最可能改变自己当前的optimal action?
$$ V(s)=\underset{a}{max}[Q(s,a)] $$
根据上述公式,即问最大$Q(s,a)$中的a什么时候最可能发生改变?
答案是:如果在迭代后继节点时造成$maxQ$与当前的$V$差值较大,此时更可能改变。但并不是一定,因为有可能是相同action对应的Q发生大改。但这种启发式的衡量方式计算简便且准确度并不低。
为什么要引入临界值$\theta$?
当差值较小时,我们不希望重新把前驱结点加入更新队列,$\theta$用于衡量这一临界值。换句话说,$\theta$越大,迭代次数就越少,迭代结果就越不准确。
1 | def runValueIteration(self): |
Q6 Q-Learning
当你理解了Q-Learning为什么work后,这一节无非就是把公式转换为代码罢了。
1 | def update(self, state, action, nextState, reward): |
Q7 Epsilon Greedy
1 | def getAction(self, state): |
Q8,Q9都不用修改代码,只要前面的代码足够general即可
Q10 Approximate Q-Learning
同上,只要理解了公式,代码无非就是表达公式。
1 | def getQValue(self, state, action): |
这道题在正确性之外有一点值得注意:
经典Q-Learning在Pacman地图size很小时表现尚可,可一旦地图扩大,学2000轮都还是在乱走;而使用近似Q-Learning后,学50轮就表现得非常不错了,为什么?
- 地图size扩大后,状态数激增(经典Q-Learning中地图上任意一点不一样都是不同state),因此学习阶段能覆盖的policy占比很少。换句话说,即使学习时间全部用于exploration,都可能还没覆盖到optimal policy。
- 近似Q-Learning抽取原来状态的重要特征,泛化了学习。因此能够在尽可能少的学习时间里,找到最优解。
这个现象说明近似Q-Learning不光节省空间,只要特征抽取合理也能极大地提高学习效率。